About me
I am a Ph.D. student at the Department of Automation, Shanghai Jiao Tong University (SJTU), working with Prof. Cailian Chen, Prof. Jianping He, and Prof. Xinping Guan. I received the B.Eng. and M.S. Eng. degrees in Automation from North China Electric Power University in 2016 and 2019, respectively.
I am focusing on Machine Learning for Data-driven Modelling, Safety-critical, and Optimal Control. I dedicate to applying these techniques to Digital-Twin Systems for industry and industrial robotics.
What i'm doing
-
Safety-Critical Motion Plan
Guarantee the safety and optimality of the motion plan.
-
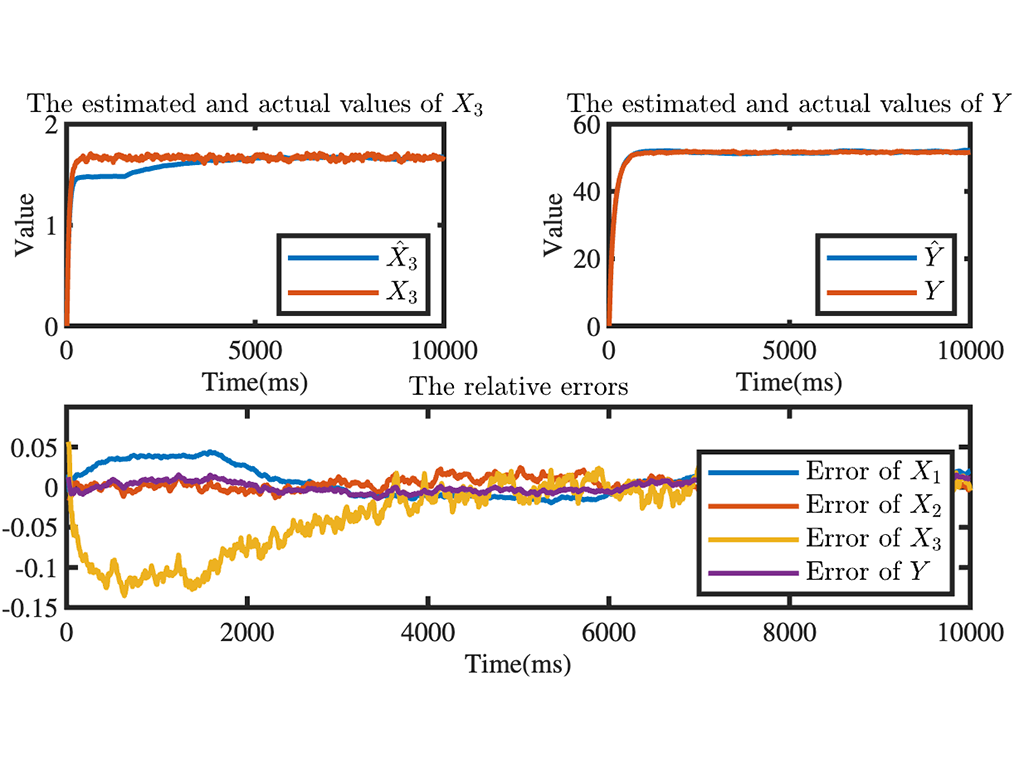
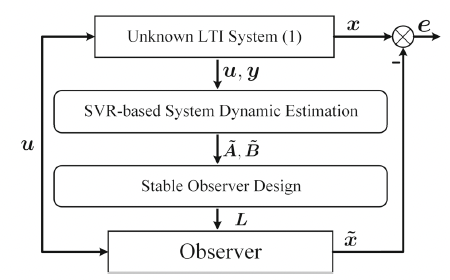
Data-driven Modelling
Extract bounded error model based on process data.
-

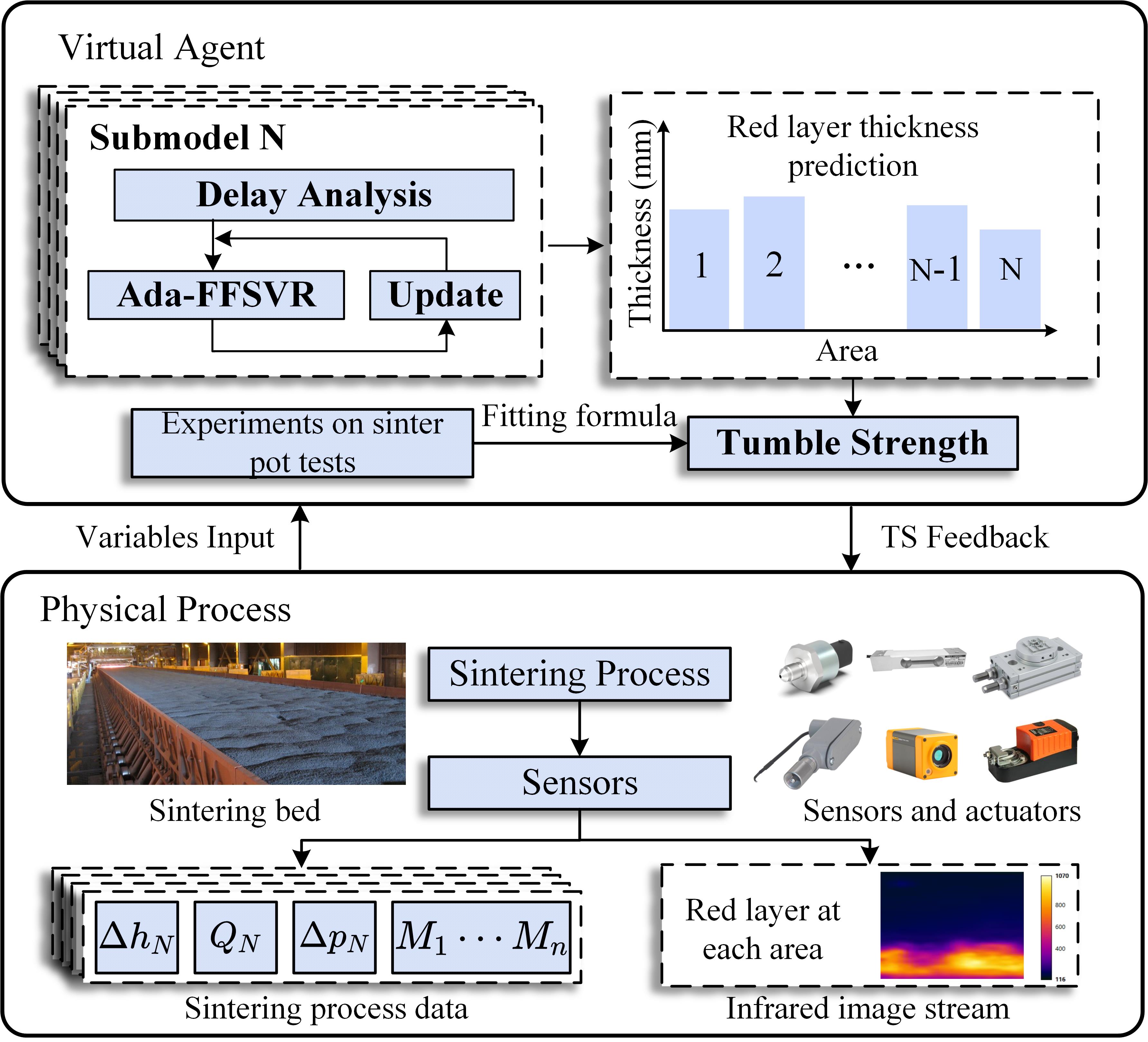
Digital Twin System
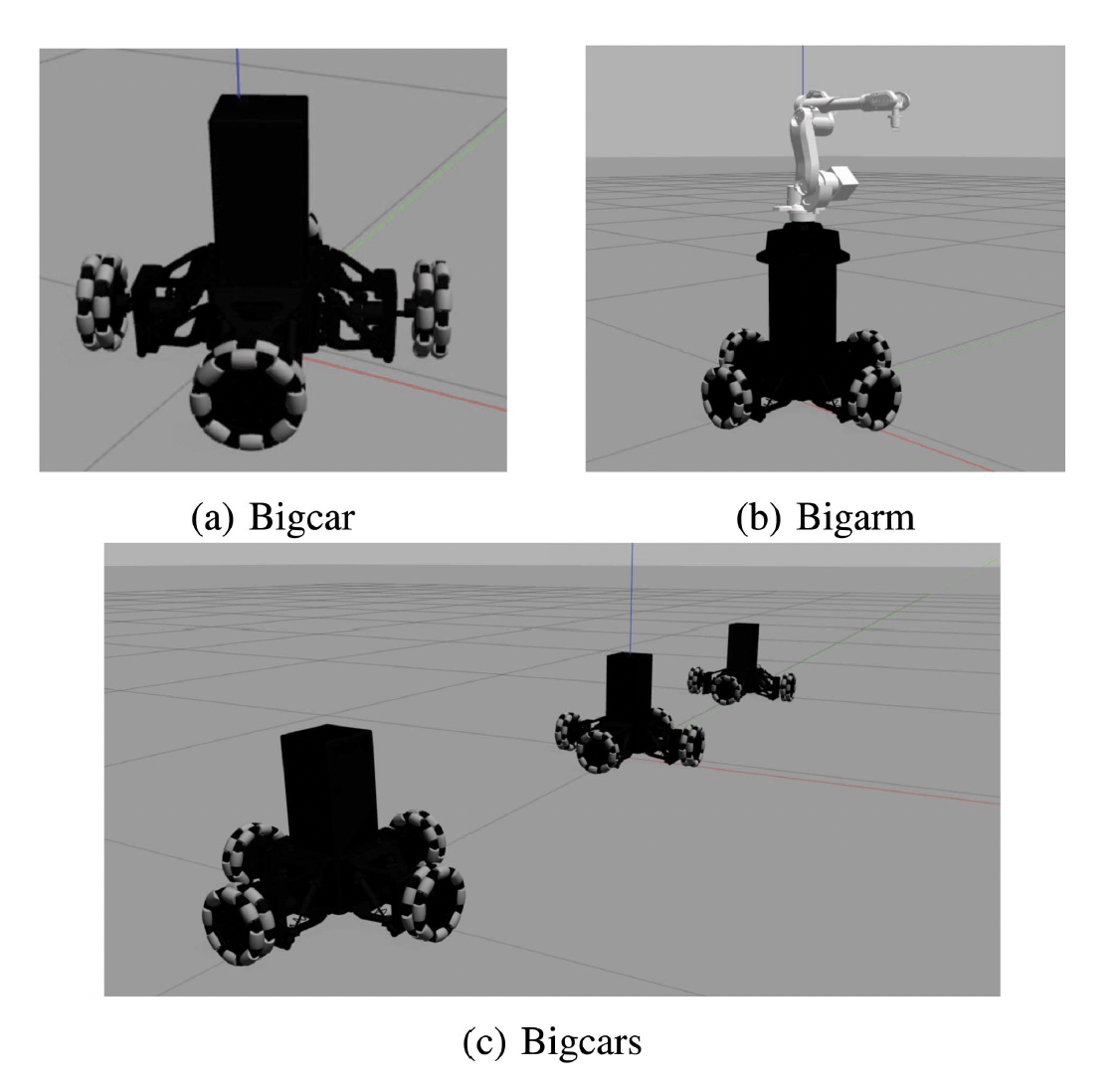
Construct digital-twin systems for industry and robotics.
-

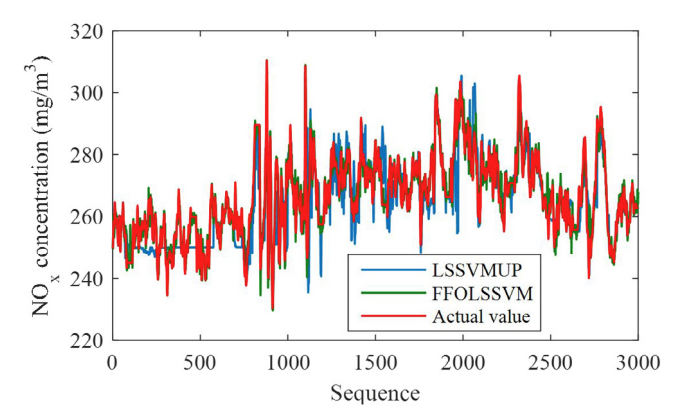
Learning Methods in Industry
Predict the industrial variables based on learning methods.